
Engineering Design Prompt
This project is based on research done in the Engineering Practicum at the Advanced Technology Center. A large amount of research and a loose design for a tethered underwater ROV was developed. This project entails the finalization and construction of the tethered underwater ROV. Furthermore, it serves primarily to equip the ROV with the necessary systems and software to be utilized in real-world research settings.
By designing and implementing a water sampling mechanism, a conductivity, temperature, and depth sensor package, a photogrammetry system, and programming a dashboard and telemetry system, the ROV would be adequately suited for a proper research mission analyzing local marine environments and making decisions related to the growth and farming of oysters.
This senior capstone project was completed at the OL Math and Science Academy, focusing on marine environment analysis and oyster farming decision support. The ROV should theoretically operate at depths up to 30 feet with reliable telemetry communication and comprehensive sensor data collection. I archived the project in the summer of 2025 while I was working, but I hope to continue working on it in the future.
Project Methodology & Sources
Design Approach: This project involved significant integration work combining existing technologies and methodologies. The ROV frame design was based on established PVC-based ROV construction techniques from the DIY ROV community, particularly resources from Homebuilt ROVs and Bit Driven Circuits.
Original Contributions: My primary contributions included the integration of multiple sensor systems, custom Arduino programming for data collection and telemetry, 3D printed waterproof housings, and the development of a Python-based data visualization dashboard.
Technical Integration: The project demonstrates my ability to research, integrate, and adapt existing technologies rather than designing everything from scratch - a valuable engineering skill that reduces risk and leverages proven solutions.
Technical Report
View the complete technical documentation and research findings for this project.
Problem Statement & Objectives
Environmental Challenge
With the current oyster population, it would require over a year for the entire Chesapeake Bay to be filtered. Oysters filter food through their gills and can remove sediments and other contaminants that pollute the bay. They also consume algae and help to reduce nutrients like nitrogen and phosphorus which set the stage for several environmental issues [1].
Using underwater ROVs to map oyster populations for more efficient planting and harvesting has the potential for wide-reaching consequences. Such a device could significantly impact local oyster populations and ecosystems, with potential benefits for global climate health and the aquaculture industry.
Industry Need
Currently, a number of organizations are working to restore the total oyster population back to its peak, but unlike agriculture, aquaculture is rooted in outdated methods of farming with little modern technology in use. With an affordable underwater ROV, oyster farms or restoration sites using bottom culture would be able to scale their operations much more efficiently.
With several sensors, ROVs could be used to collect a wide range of data to help farms make better decisions regarding their planting and harvesting. Using imaging sensors, data could be gathered to find hard surfaces where oysters could thrive without being buried in sediment. Imaging could also be used to evaluate the health and maturity of oysters.
Economic Impact
Oyster restoration has the potential to significantly grow aquaculture in the economies surrounding the Chesapeake Bay. With continued investment in restoration and maintenance of the oyster population, a wide range of jobs have been created. For example, in a single oyster reef restoration project in the Northern Gulf of Mexico, nearly 90 jobs were created [2]. Additionally, an increase in the oyster population would allow for higher capacity of several popular aquaculture species in an industry already worth more than $30 million [3].
Project Components
Water Sampling Mechanism
In ProgressThe water sampling mechanism must interface and be controlled by the central Arduino. Once collected, the sample must remain locked in a container for the remainder of the ROV's journey. One of the biggest challenges with this ROV is the need for adequate waterproofing - both the container holding the sample and the electronics required to trigger the sampling mechanism need to be waterproof; the container to prevent contamination of the sample and the electronics to prevent shorting.
CTD Sensor Package
CompleteThe conductivity, temperature, and pressure sensor package allows oyster farmers to determine optimal locations to grow or harvest oysters. These sensors are placed in a separate compartment from the main electrical compartment as a failsafe measure. With additional sensors and the need for them to interact with the water outside the ROV, the risk of leakage increases significantly. This compartment requires adequate waterproofing measures and wiring from the sensor package back to the main electrical compartment with the Arduino controller.
Telemetry System
CompleteRS485-based communication system with twisted tether cable for reliable data transmission over long distances. The sensors and telemetry system must be accurate and provide real-time, reliable data without interference. The pressure sensor must be tested for accuracy to ensure proper depth calculations. The ROV must be waterproofed completely, including the electrical components such as the Arduino microcontroller and sensors and the locations where they interface with tether outside the ROV.
Backend Software
In ProgressA dashboard connected to the Arduino streams sensor information in real time, enabling better navigation and real-time analysis of the ROV's environment. By connecting a laptop to the Arduino and importing data from the COM ports into a Python program, NumPy and SciPy libraries create graphical visualizations of the data. A graphical user interface programmed with Tkinter presents the graphs on a dashboard for easy manipulation and data export.
Photogrammetry System
In ProgressThis consists of a GoPro mounted to the front of the ROV set to take images at a preset interval. After a run, the images are collected and fed through photogrammetry software to create a 3D image of the surrounding terrain. This portion of the project remains challenging as it largely depends on local marine environments being clear enough to get quality images for the software. Environments with high levels of turbidity would render this system ineffective.
Control System
CompletePlayStation controller integration with custom Arduino library for intuitive ROV operation. The ROV design is based on an Arduino located on the ROV, and all systems must interface and be controlled by this central Arduino. The control system enables precise maneuvering and operation of all ROV subsystems including propulsion, sensors, and sampling mechanisms.
Technical Challenges
Key Technical Challenges
Telemetry System
RS485 modules with twisted tether cable for signal integrity and interference reduction over long distances. Implementation based on Arduino RS485 library documentation and standard industrial communication protocols.
Control Interface
PlayStation controller integration with custom PWM range identification for precise joystick control and signal processing. Controller mapping and PWM interpretation developed through Arduino documentation and community resources.
Photogrammetry System
GoPro mounting and positioning for underwater 3D modeling and environment documentation. Photogrammetry processing using RealityCapture software following established underwater photography techniques.
Sensor Programming
Arduino-based sensor integration for pressure, temperature, and conductivity measurements with real-time data processing. Sensor libraries and calibration procedures adapted from manufacturer documentation and Arduino community examples.
3D Printed Electronics Housings
Custom-designed waterproof enclosures for electronic components using SolidWorks and additive manufacturing. This represents my most original design work, creating custom housings to fit specific component layouts and waterproofing requirements.
Project Gallery
ROV Front View
Complete underwater ROV assembly with propulsion system and sensor mounts
.jpg)
ROV Top View
Top-down perspective showing the overall system architecture
.JPG)
ROV Assembly
Complete underwater ROV with PVC frame, thrusters, and sensor array
.jpg)
ROV Electronics
Internal wiring and electronics housing with waterproof enclosure

ROV Overview
Wide-angle view of the complete ROV system with propulsion and control components
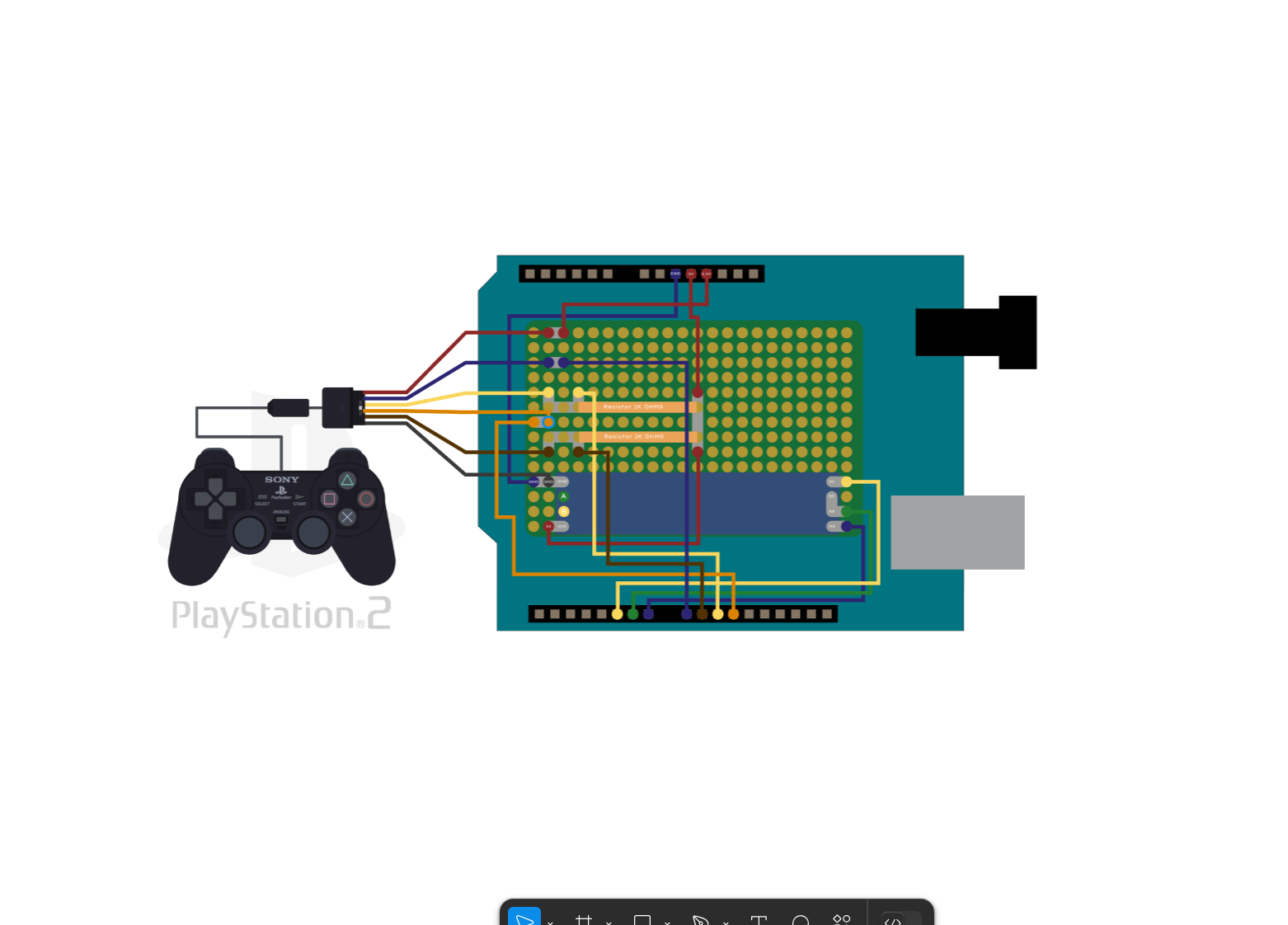
Controller Integration
PlayStation controller wiring diagram for ROV control system
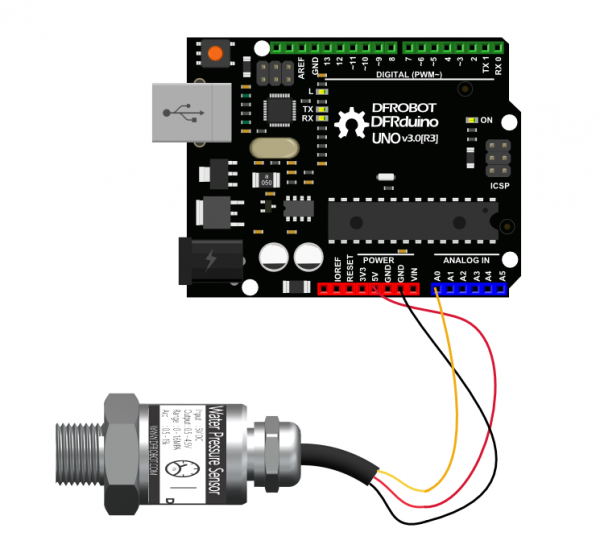
Pressure Sensor
Depth measurement sensor integration with Arduino control system
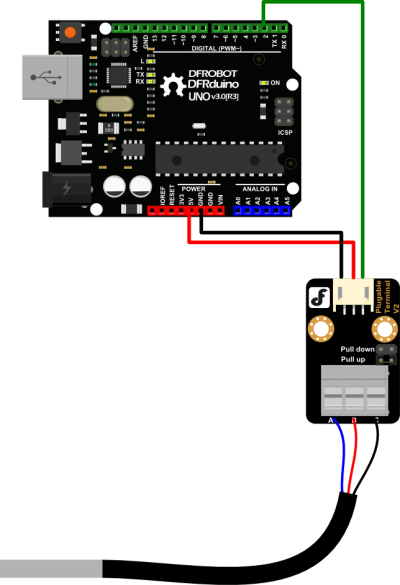
Temperature Sensor
Water temperature monitoring sensor for environmental data collection
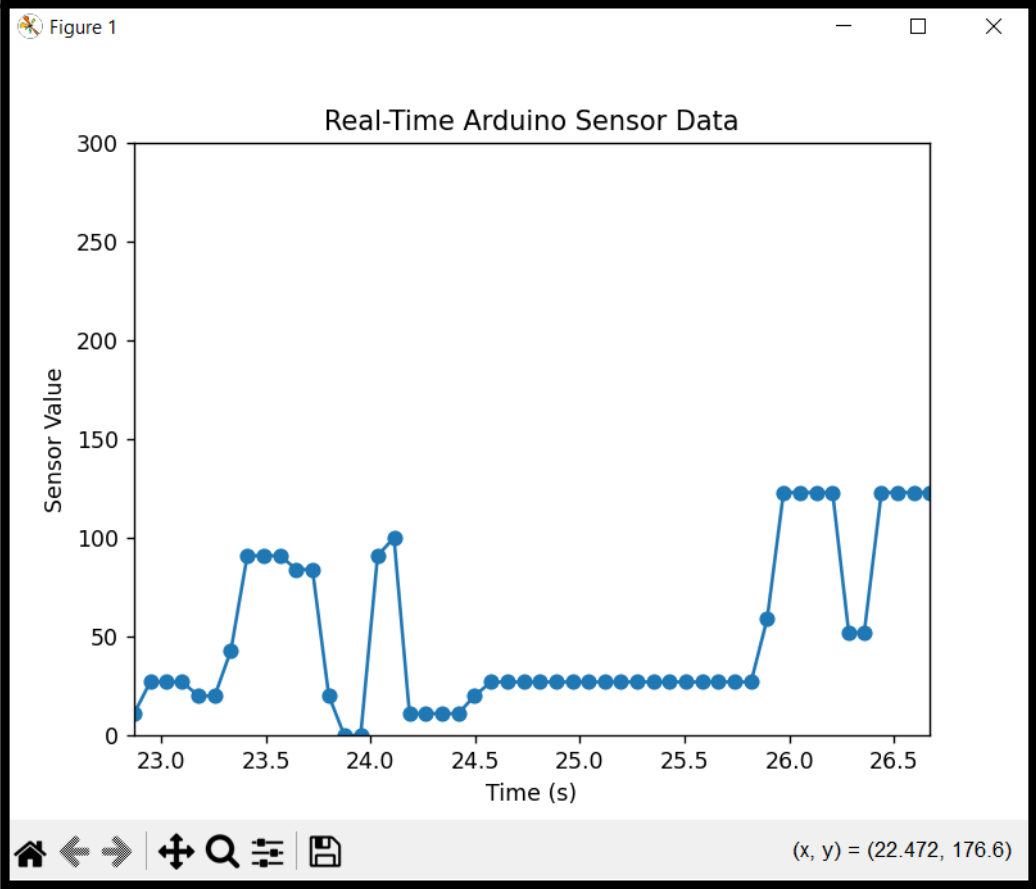
Real-time Sensor Data
Live Arduino sensor data visualization showing pressure and temperature readings

RS485 Communication
Digital signal waveforms for reliable telemetry data transmission

Backup Camera System
Secondary camera feed for enhanced ROV control and monitoring

Photogrammetry Output
3D model generated from underwater photographs for environment mapping

Photogrammetry Software Interface
RealityCapture software for processing underwater photographs into 3D models
Project Results & Impact
Project Success
Overall, this project was extremely successful. The underwater ROV is now able to successfully gather pressure and temperature data, relay such information over a tether, and present it on a digital display for immediate analysis. The ROV is also able to collect water samples which allows for at least some further analysis even if some properties of the sample such as turbidity may be inaccurate.
Compared to similar projects, it aligns with its results providing a low-cost device to investigate marine environments. It does however include designs that provide purpose to this class of devices (budget DIY ROV projects) implementing water sampling and sensor packages. Overall, this project adds to the existing body of knowledge supporting the utility of smaller-scale budget ROVs for research and potentially oyster farming.
Key Achievements
- Successful pressure and temperature data collection
- Reliable telemetry system over 30ft tether
- Functional water sampling mechanism
- Real-time data display and analysis
- Intuitive PlayStation controller operation
Research Impact
- Low-cost marine environment investigation
- Oyster farming decision support
- Educational tool for marine science
- Open-source design contribution
- Budget-friendly research platform
Future Work & Personal Reflection
Areas for Improvement
As I continue working on this project, there are several main areas I plan to address. First is optimizing the current design - the pressure sensor requires further calibration for more accurate depth calculations. The soldering and PVC construction in some locations needs improvement, and to ensure a longer lifespan, the ROV will likely require replacement using the skills I've developed throughout this project.
Revisions to the water sampling mechanisms may be necessary depending on researcher consultation and determining how the bilge pump may alter water samples. The sensor package could be enhanced with an increased budget or creative designs, including additional sensors to collect more detailed information about the ROV's surroundings.
I plan to incorporate machine learning into the ROV to address photogrammetry challenges. With proper programming, the ROV may be able to learn how to navigate around features and optimize imagery collection to better suit existing photogrammetry software needs.
Learning Outcomes
Throughout this project, I've improved my computer-aided design, circuit design, electrical engineering knowledge, soldering skills, and understanding of environmental science. The numerous challenges in both construction and programming strengthened my perseverance and problem-solving abilities for future projects. I've learned to plan for setbacks and adapt accordingly. Additionally, I've gained understanding of how to undertake larger research projects and apply knowledge and skills from my education to address real-world problems. This project has been an invaluable experience that I expect will benefit my engineering career.
Get In Touch
Interested in learning more about this project or collaborating on similar engineering challenges?
GitHub
View project code and documentation